Deploying Ultralytics YOLO26 Using ROS 2

Computer Vision (CV) is when a machine processes visual data to perceive its environment, just as humans can. Robots using CV can operate on single images or continuous video data, which allows them to recognise objects, detect obstacles, track movements over time, and navigate in complex space. For instance, autonomous vehicles can use camera data for safety systems or even fully autonomous driving.
This post walks through building a simple ROS 2 node that detects objects in real time using a robot's webcam and the Ultralytics YOLO26 model. The purpose is to show how simple it is to deploy Ultralytics models on a robot using the ultralytics Python package, as well as walking through a simple ROS 2 node for CV.
This post has been sponsored by Ultralytics. Check the following links for more information about Ultralytics YOLO26 or metrics of specific Ultralytics YOLO26 models:
Ultralytics YOLO26 Docs: https://docs.ultralytics.com/models/yolo26/?utm_source=infl&utm_medium=video&utm_campaign=yolo26&utm_term=mh
Ultralytics YOLO26 Platform: https://platform.ultralytics.com/ultralytics/yolo26?utm_source=infl&utm_medium=video&utm_campaign=yolo26&utm_term=mh
The links have parameters to show you came from here!
Ultralytics YOLO26 Infographic
Ultralytics YOLO
YOLO Models
Ultralytics provides a suite of CV models called YOLO, or You Only Look Once, designed for efficient and accurate CV tasks. These models are widely used due to their strong real-time performance, simple APIs, and broad hardware support. In my case, it was extremely simple to deploy a model to the OriginBot, although it only runs on the CPU; the RDK X5 on board has hardware acceleration available, but I wanted to keep the ROS 2 node simple so it would be easy to understand. See my article Exploring AI on the RDK X3 Sunrise for more information on the RDK X5's predecessor, the RDK X3.
YOLO models offer the following applications:
- Object Detection: Identify and locate multiple objects within a frame.
- Segmentation: Generates masks, or pixel regions, which belong to a particular object. For example, highlight the areas of an image occupied by ships in a dock.
- Image Classification: Classify an image as belonging to a particular class. For example, an image containing a keyboard may be given the Keyboard class.
- Pose estimation: Estimate the position and orientation of any humans within a frame. Each humans can have a simple skeleton drawn showing the location of their heads, torsos, and limbs.
- Tracking: Tracks an object or person between frames of a video, showing the change in position over time.

Ultralytics YOLO26 is available under two licensing options. The AGPL-3.0 license is an OSI-approved open-source license, perfect for students, researchers, and enthusiasts who want to collaborate openly and share their work. For commercial use or private R&D, the Ultralytics Enterprise License allows seamless integration into proprietary products and services without the open-source requirements of AGPL-3.0. I'm using the models under the AGPL-3.0 License for this demo.
Ultralytics YOLO26
Ultralytics has released multiple sets of YOLO models over the years, including YOLOv5, YOLOv8, and YOLOv11. The latest model that was released (generally available as of January 2026!) was Ultralytics YOLO26, which is the model we will use for the demo.
Ultralytics YOLO26 is a drop-in replacement for previous YOLO models, so if you're using any other YOLO models (e.g. YOLOv5), it is simple to update your code to use the new model. There are a few advantages to upgrading, as the new architecture of Ultralytics YOLO26 offers faster inference, better performance on large and small objects, and broad hardware compatibility.
The demo from this post only runs on CPU, although it could run much faster with hardware acceleration, and Ultralytics aims to support as many types of hardware acceleration as it can.
Running Ultralytics YOLO26 model on my robot
To test Ultralytics' claim that the model is easy to deploy, I wrote a simple ROS 2 node that receives images from a camera and performs inference on them. More information on how to build and deploy the node in this sections.
I ran this node on my OriginBot, which uses the RDK X5 as a brain. The RDK X5 has hardware acceleration on board that can run YOLO models extremely quickly, but I chose to run the model using CPU to keep the node simple and easy to understand. Hence, the images come through more slowly than the board is capable of.
I also ran the node on my desktop computer, as it could process the images much faster, so that I could get some examples of the detections from the model. Hence, running the yolo26n.pt model on my desktop gave some of the following results. I tried a series of objects I had nearby to see what would be recognised by the model to select the objects used below.
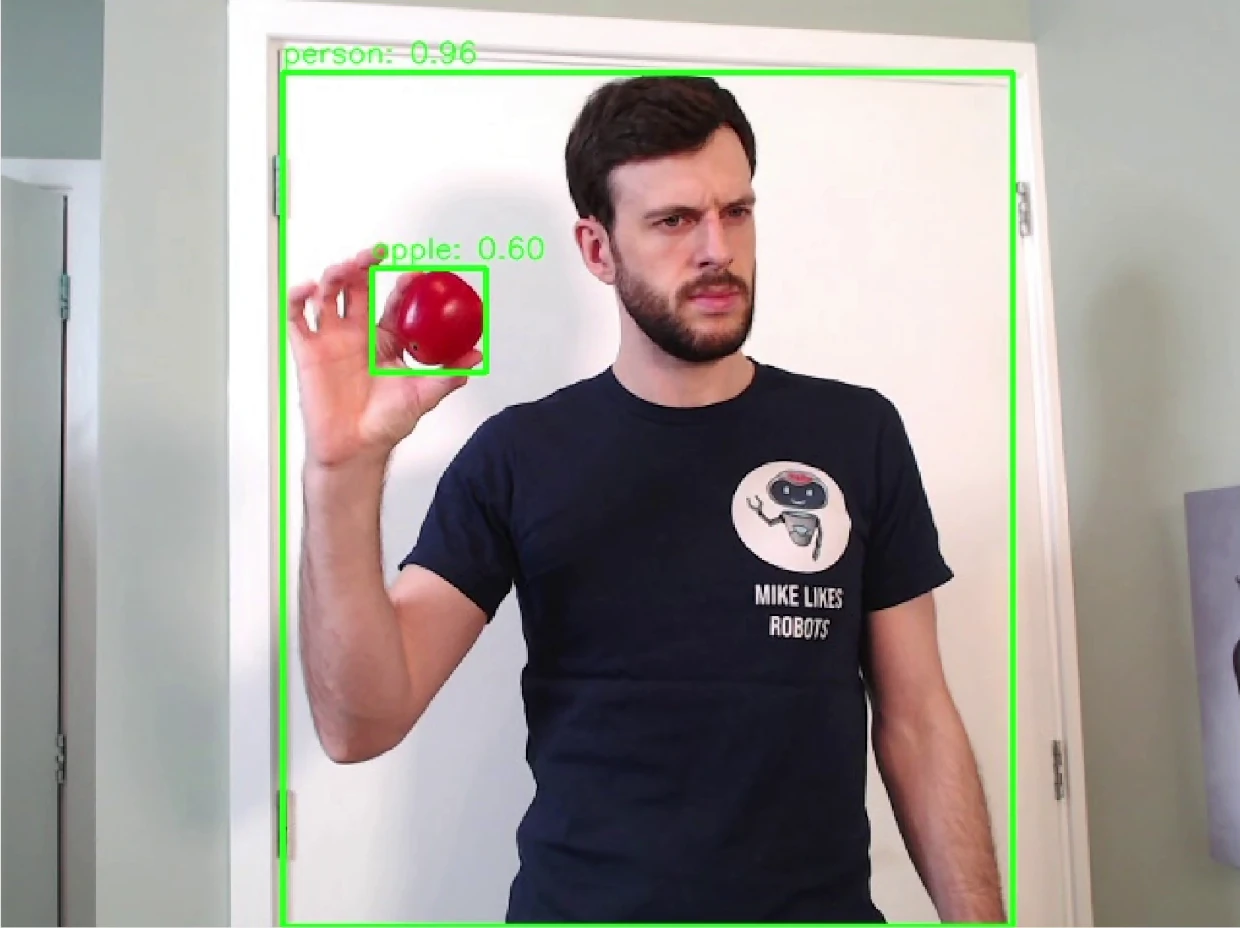
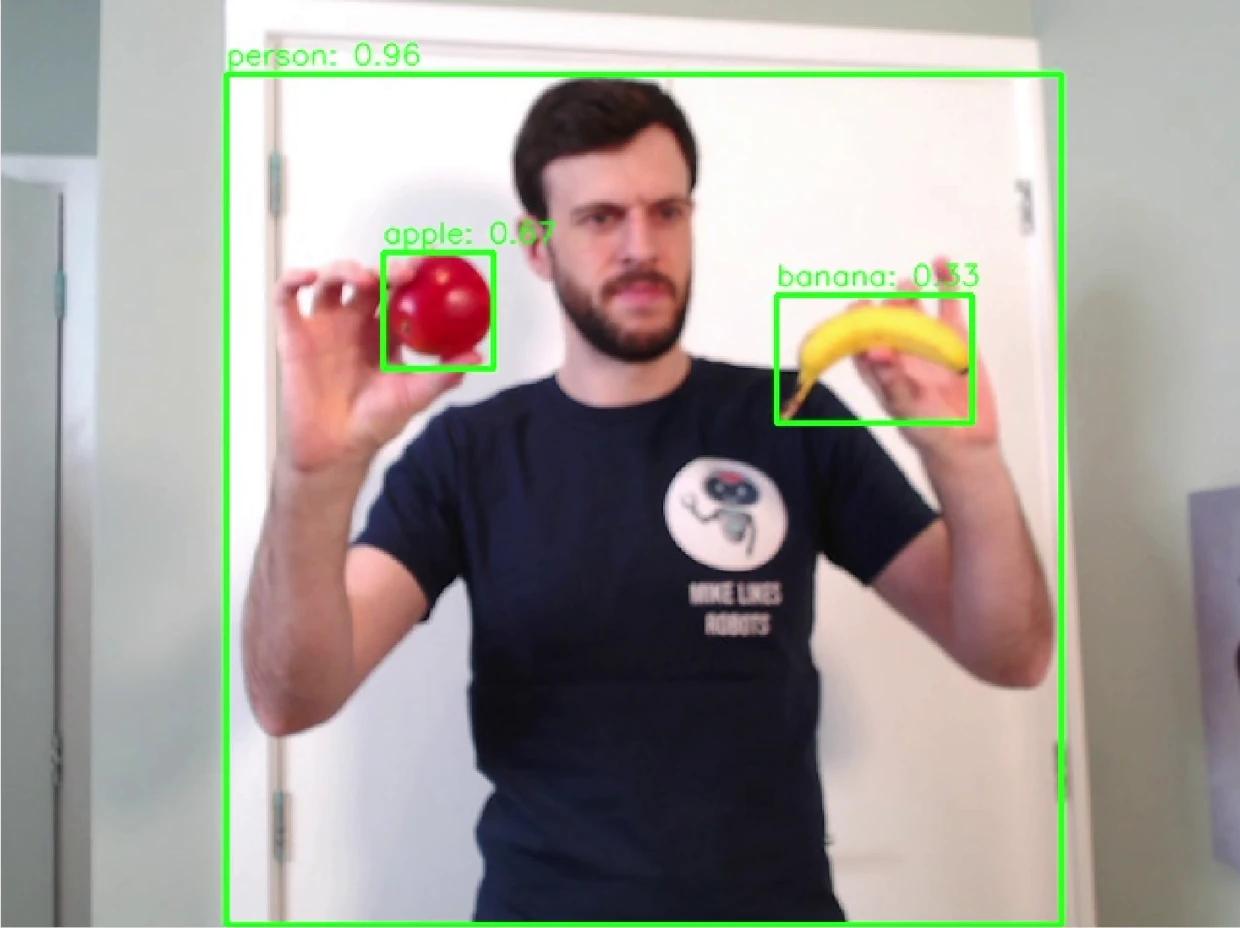
First, the model performed very well with fruit like apples and bananas, even when the image wasn't properly focused.
The model also performed well for my phone.

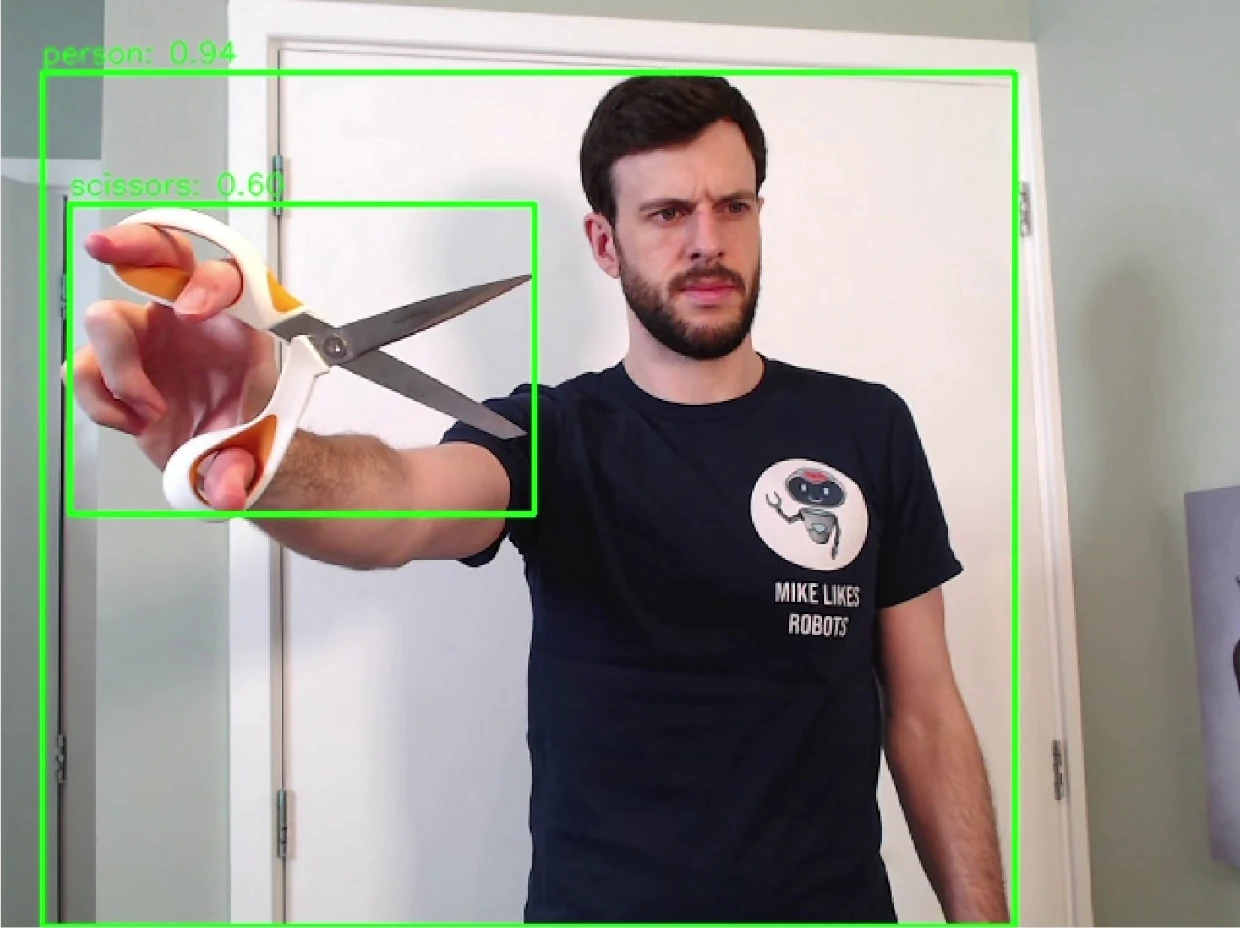
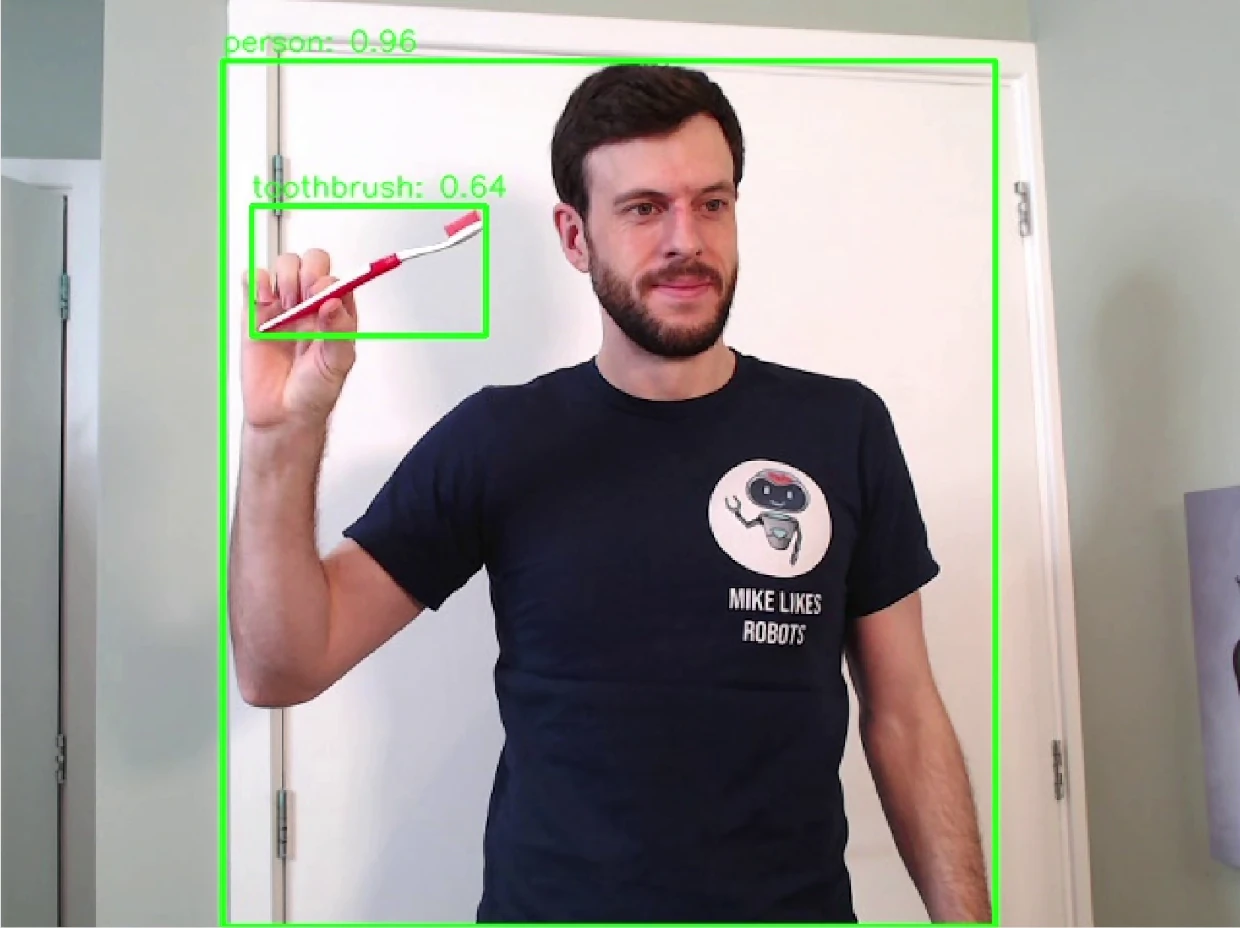
The model had more trouble with objects like these scissors and toothbrush, but could still recognise the objects most of the time. I found that the model could recognise scissors more easily when up close and opened up.
There were also some objects that the model didn't recognise well. My examples are a water bottle and a screwdriver.
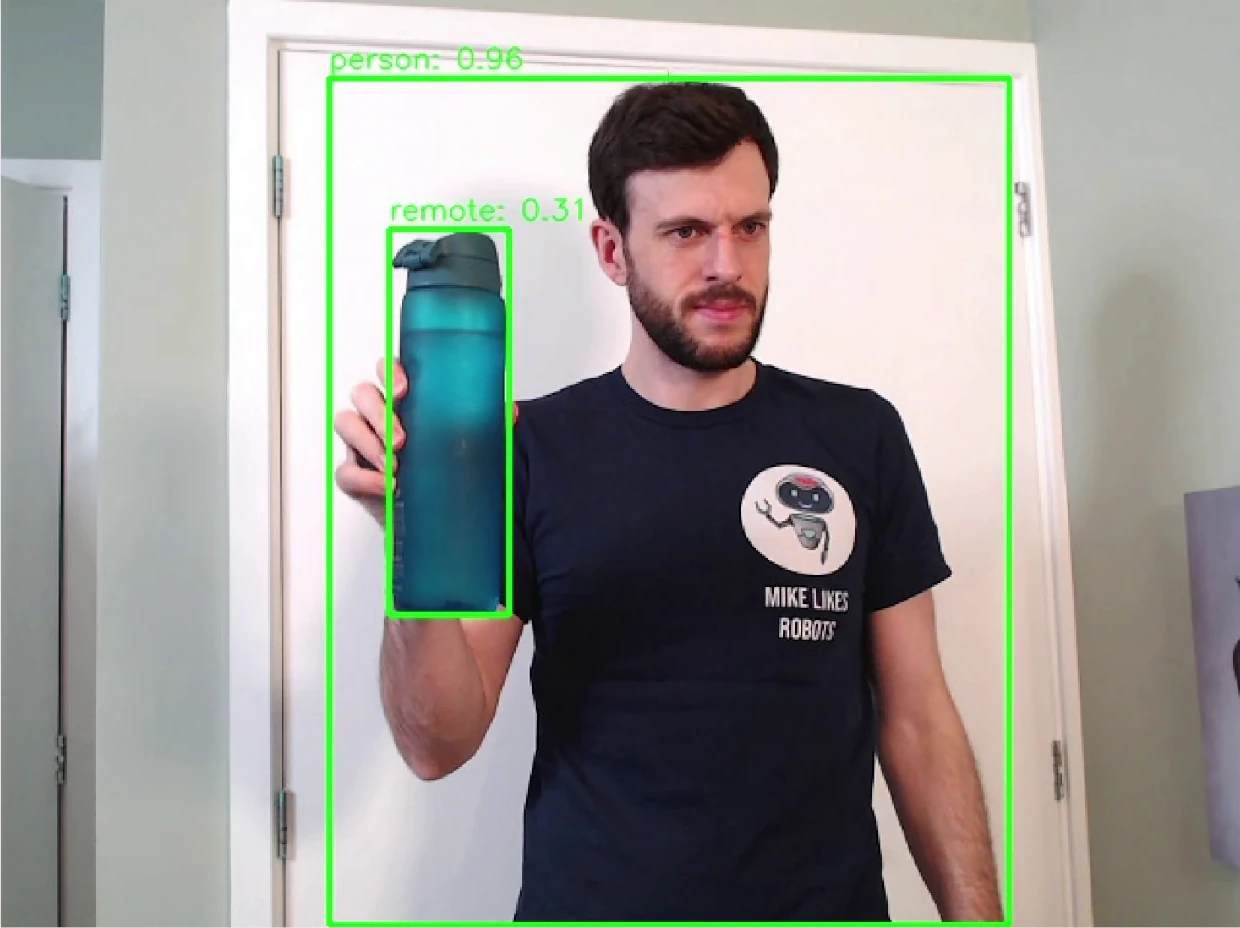
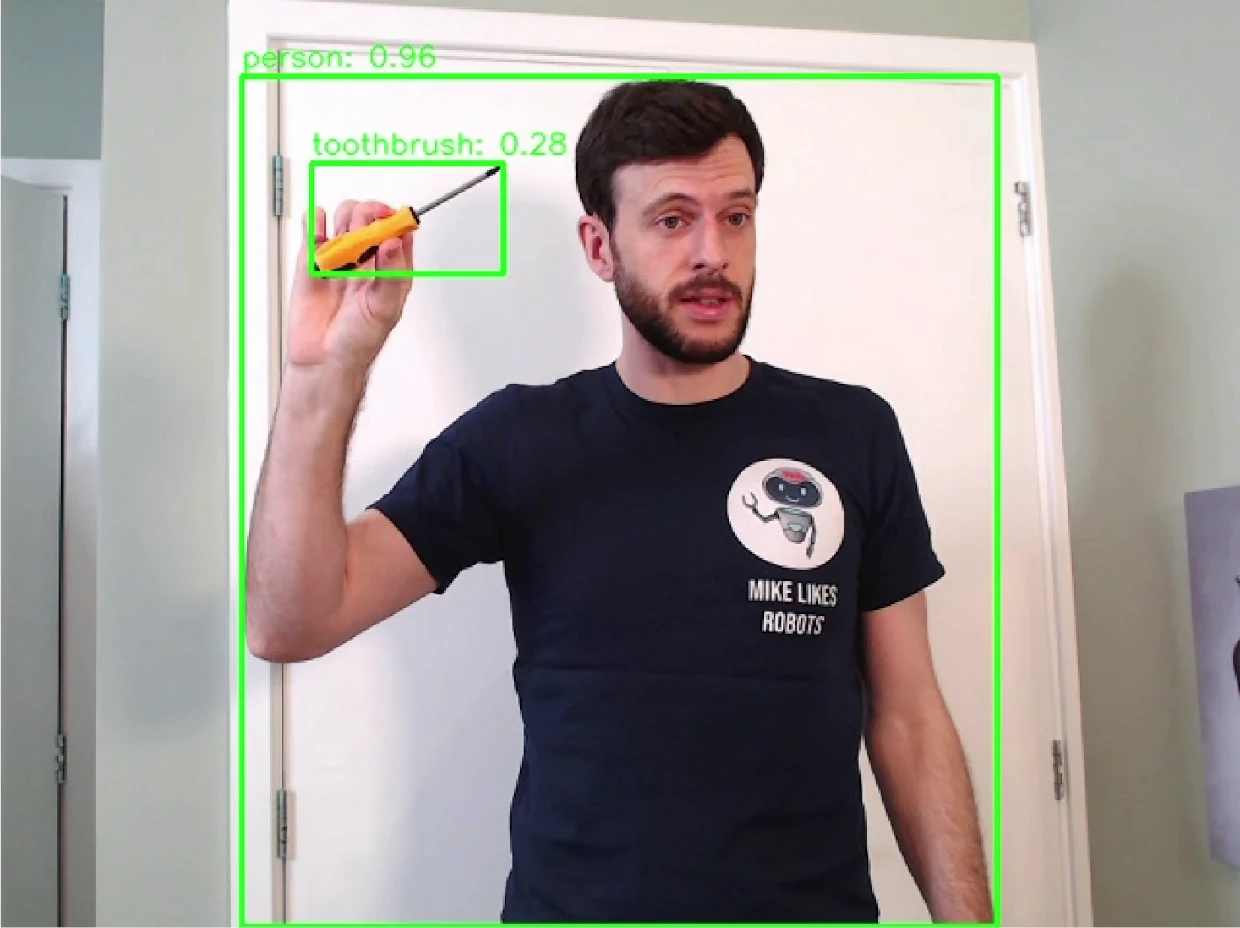
This isn't surprising, because the model was likely not trained on these objects at all. The model will only be able to recognise objects it has been trained on; otherwise, it will ignore the objects, or label them as a similar object that is has been trained on. If you're using YOLO models in your own application, you may need to train them further for better performance on your required objects. More information is available at Model Training with Ultralytics YOLO.
Finally, as a bonus, my cat was mostly recognised as a cat, but was also labelled as a teddy bear and a dog. I enjoyed that the teddy bear confidence (45%) was higher than the cat confidence (27%), depending on the frame.
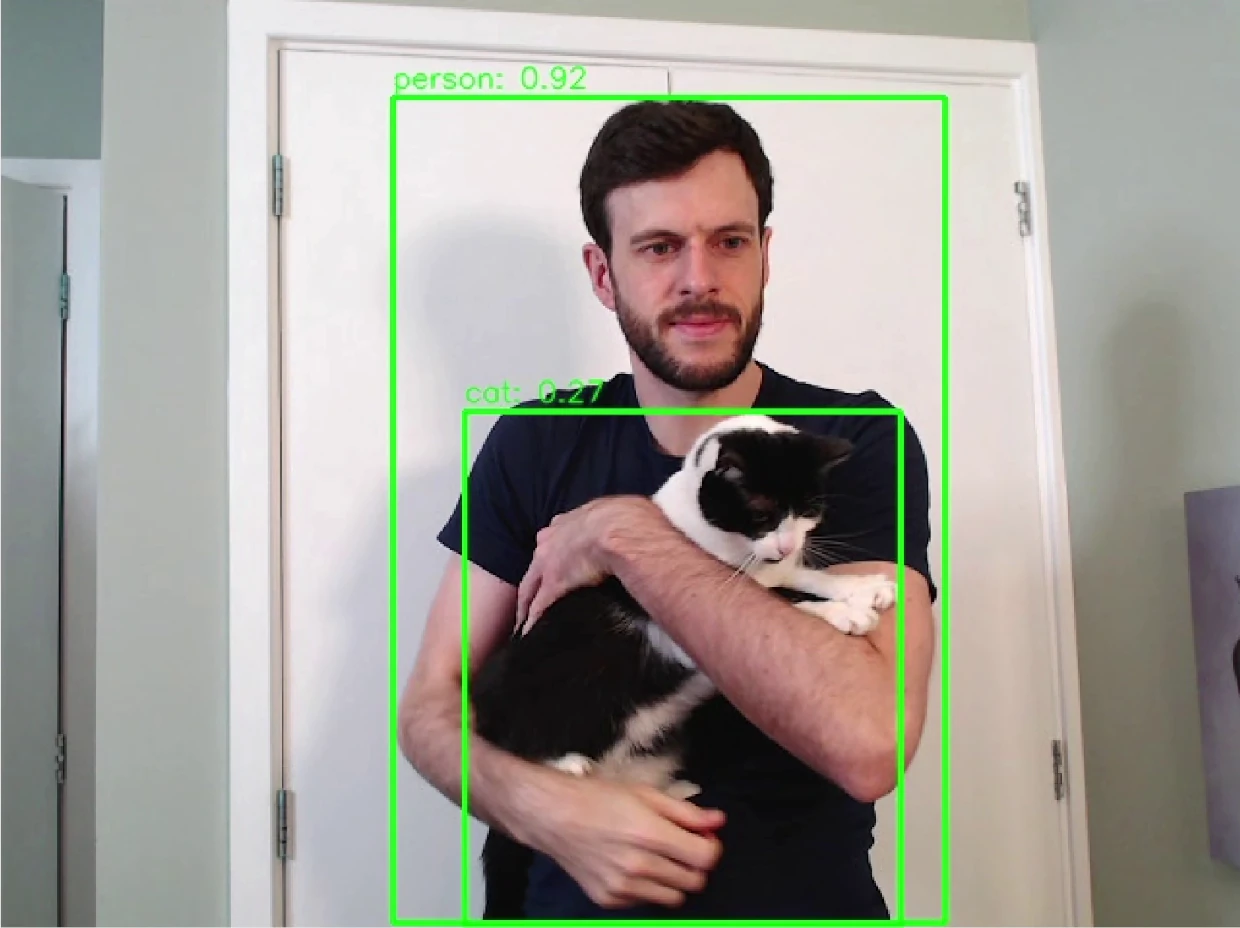
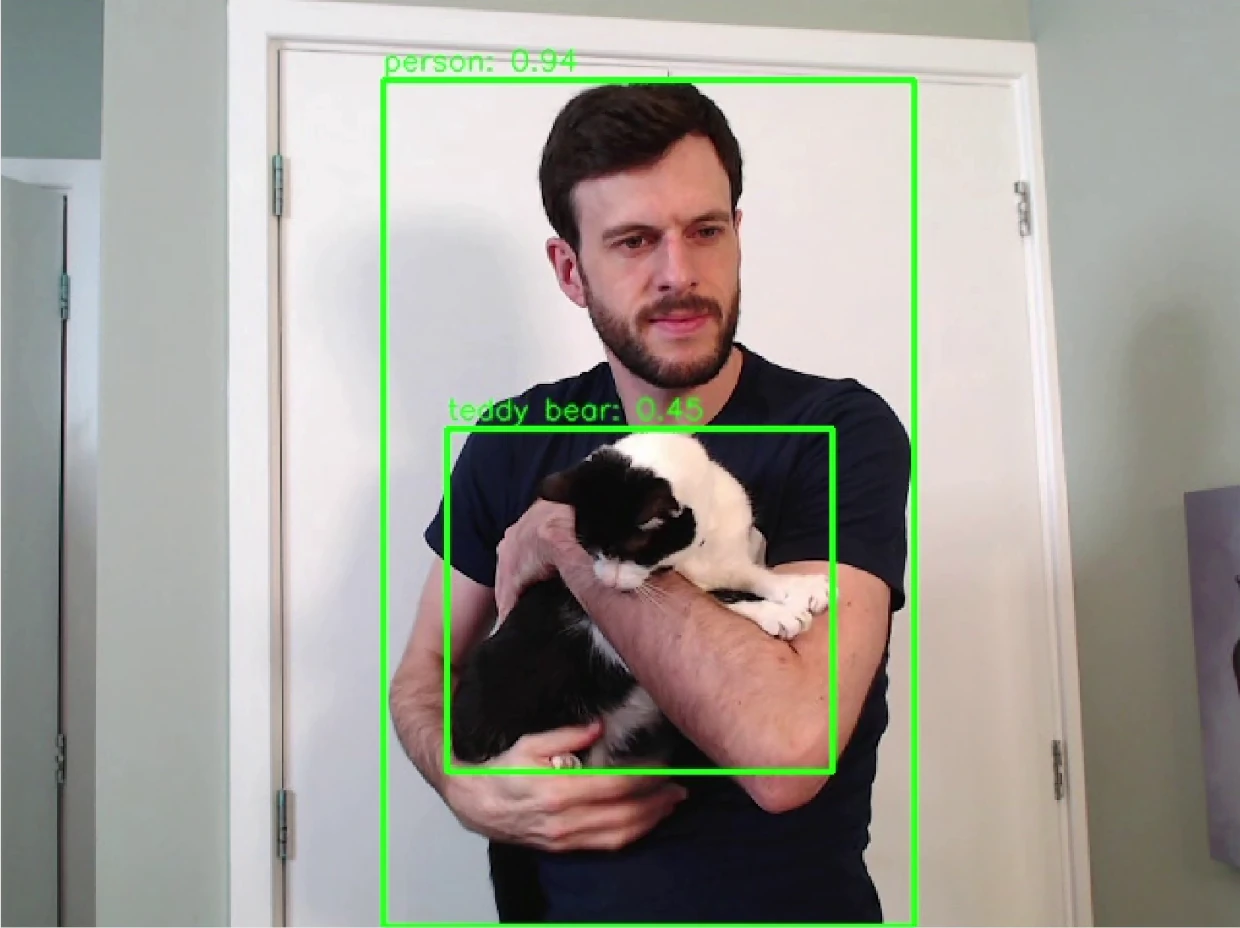
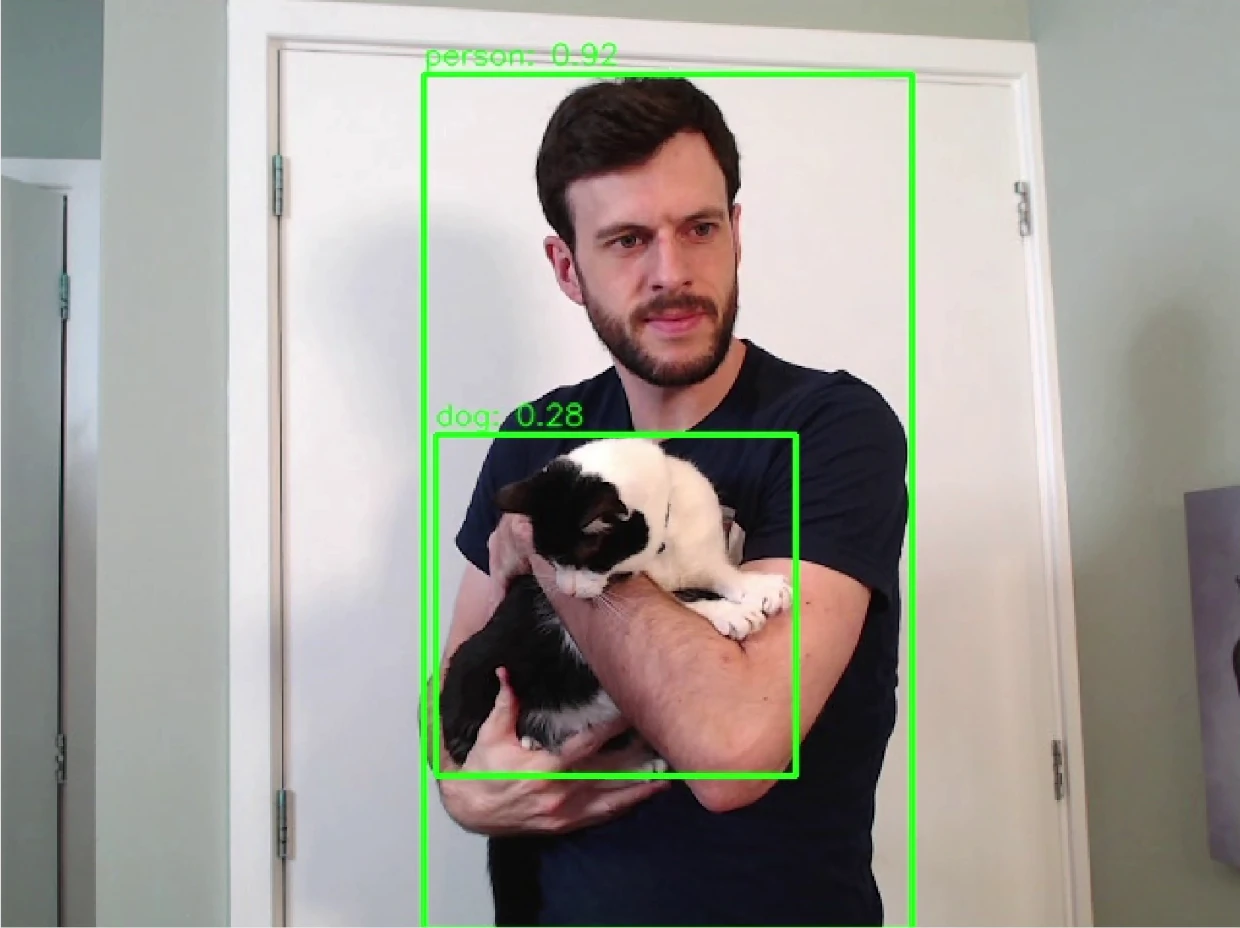
The dog label isn't too surprising to me. Depending on the angle, it can be hard to tell cats and dogs apart.
Now that we've seen some examples of objects detected by the network, let's look at how to deploy the model to a real robot.
How to run Ultralytics YOLO26 in a simple ROS 2 node
I tend to build robotics applications using the ROS 2 framework. ROS 2 comes with a lot of advantages, but the main reason I use it is that it's free and very widely used, which makes it a great teaching tool. For more details on ROS 2, take a look at my previous blog post Getting Started with ROS 2.
ROS 2 works by separating robot tasks into different nodes that communicate by passing messages. In a robot with Computer Vision, we might have one node that reads images from the camera and publishes them, and another node that subscribes to those images and performs inference on them. That's exactly the setup in today's demo.
Let's go through installing dependencies and running the code before taking a closer look at the code in the Code Deep Dive section.
Install ROS 2
The first step on a robot is to install ROS 2. If your robot is running Ubuntu, it's very simple - just follow the instructions here.
If your robot isn't running Ubuntu, there are still installation options. Take a look through the website above for how to install, or run in an Ubuntu VM if you just want to try the demo node out in simulation.
After installing ROS 2, source the setup file. Change humble for the version of ROS 2 that you've installed:
source /opt/ros/humble/setup.bash
This needs to be done in every terminal session that you run ROS 2 commands in. If you ever get the error that ros2 isn't recognised as a command, try running this source command again.
Create a Workspace
To create the workspace for this example, run the following:
mkdir -p ~/yolo_ws/src
This creates the source folder of the workspace, into which we can clone the example node:
git clone https://github.com/mikelikesrobots/yolo26_ros2/ ~/yolo_ws/src/yolo26_ros2
As can be seen from the line above, all of the code for the demo is kept on my GitHub in the yolo26_ros2 repository.
With the code checked out, we can now install dependencies and build the node. For this, we will use the rosdep tool that comes with ROS 2, which makes it very easy to install extra dependencies for packages as long as they're recognised by the ROS package index. Execute the following:
# Only needs to be executed once per system
sudo rosdep init
# Run these for any new package, including our example node
rosdep update
rosdep install --from-paths ~/yolo_ws/src --ignore-src -r -y
rosdep is installing the Ultralytics Python package automatically. For other robotics frameworks, or to install the package manually, you can run pip3 install ultralytics instead.
If you're running this command on Ubuntu 24.04, you may find that the ultralytics package doesn't install correctly, and has an odd error about uninstalling numpy. To fix this, the best thing to do is build the OpenCV bridge from source, which bypasses the conflict.
git clone -b humble https://github.com/ros-perception/vision_opencv.git ~/yolo_ws/src/vision_opencv
cd ~/yolo_ws
colcon build --packages-select cv_bridge --cmake-args -DCMAKE_BUILD_TYPE=Release
You can then proceed with the instructions as before.
With all dependencies installed, we can now build the workspace:
cd ~/yolo_ws
colcon build --symlink-install
The code is now fully built and ready to run.
Running the Node
The package only builds one node called yolo26_ros2. We could run this node by itself, but it's not very useful without being supplied with camera images. To get images from a webcam, we can use a package called usb_cam, which is available for download without us having to build anything. In fact, it's already installed, as it is one of the yolo26_ros2's dependencies - we only need to run it at the same time as our CV node.
To make running both nodes at the same time easier, the package includes a launch file, which is configured to launch the yolo26_ros2 node and the usb_cam node at the same time. The usb_cam node will open the first available camera on the system and publish images from it using ROS 2. By launching these two nodes together, we can open a webcam, move images from the usb_cam node to the yolo26_ros2 node, and perform inference on them.
source ~/yolo_ws/install/setup.bash
ros2 launch yolo26_ros2 yolo_camera.launch.py
If you want to run the demo node by itself, use this ros2 run command instead:
source ~/yolo_ws/install/setup.bash
ros2 run yolo26_ros2 yolo26_ros2
Either way you launch the demo node, it will automatically download the model you've requested, which is yolo26n.pt by default, and save it to the share directory of the ROS 2 workspace.
The Ultralytics Python package has a useful feature where it will download a requested model if it's not available on disk. This should be used cautiously in our ROS 2 workspace.
As colcon build copies source files to the build output, and our node runs from the built files rather than the source files, the Ultralytics package downloads the model to the build area. If you delete the built files while cleaning the workspace, the model will be deleted too. To keep a model permanently, download the model yourself to the models directory of the source yolo26_ros2 package, and it will be copied by the build tool.
If you're not deleting the built files from your workspace, you don't need to worry!
The usb_cam package can be configured with quite a few parameters, including the camera to use and the resolution to capture images at. I've disabled these to keep the launch file more readable, but if you find that you need to change parameters, you can find more information at the GitHub page for usb_cam. Use the current launch file as a template for adding the parameters back in.
Viewing the Output
The yolo26_ros2 publishes 3 outputs, mostly for demonstration purposes. For your own use, you can remove the outputs you don't actively need, or separate them into different nodes. The 3 outputs are:
| Message Type | Default Topic | Description |
|---|---|---|
| Detection2DArray | /detections | An array of detections, where each detection has co-ordinates and detected class |
| Image | /image_annotated | The original image annotated with bounding boxes based on the Detection2DArray |
| CompressedImage | /image_annotated/compressed | The same as the previous line, except that the image is compressed so it can be sent across a network more easily |
yolo26_ros2 node, including the default topic and description of data produced.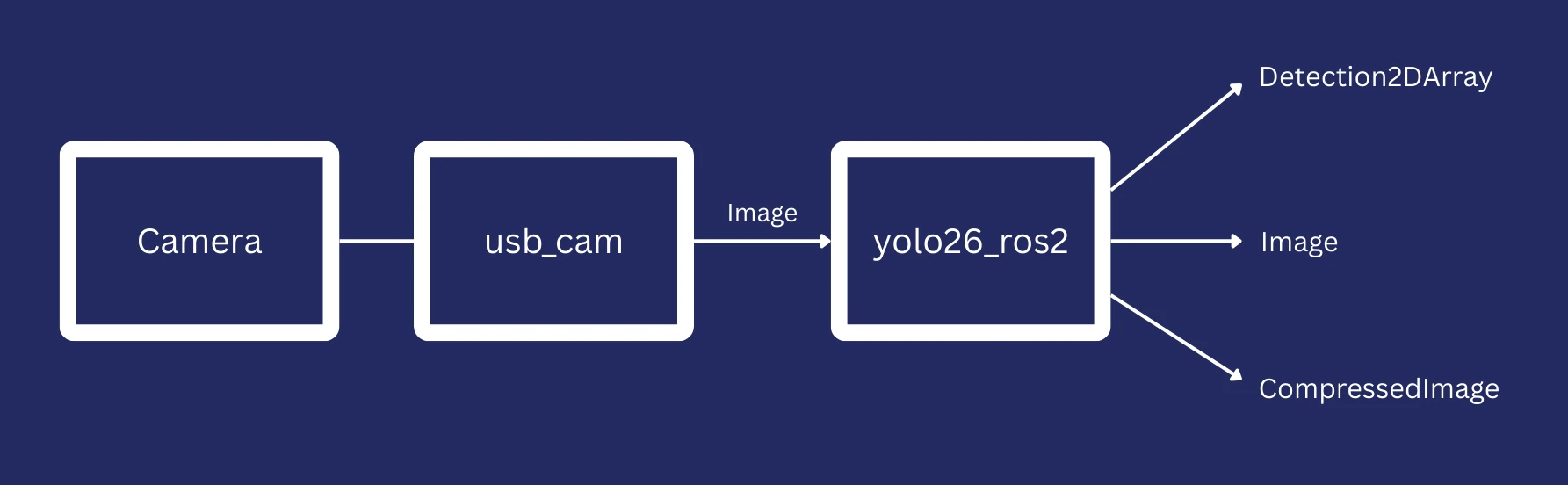
usb_cam (controlling a webcam), to yolo26_ros2, and to any other nodes.The easiest way to view the output is to use a tool to visualise the CompressedImage messages. You can either use rqt for this, or my preferred tool, rqt_image_view:
ros2 run rqt_image_view rqt_image_view /image_annotated/compressed
You should be able to see the images streaming live from the robot! You can now try moving it around and seeing what it can detect.
If you're running on a robot, you might not have a UI for viewing images. Don't worry! Any computer on the same LAN should be able to view the images from the robot. I tend to use a Windows desktop, so I run an Ubuntu VM via VirtualBox with ROS 2 installed to view the images. Normally, I use WSL2 to run ROS 2, but the networking setup makes it difficult to send ROS 2 messages across the network, so I stick with VirtualBox.
YOLO Model Parameter
Computer Vision algorithms tend to be divided into classical and Machine Learning. Classical algorithms work by spotting features in images, like edges, whereas Machine Learning versions will build a "model" from training data. This means that it uses a huge set of images with labels of what it should be looking for, and it learns to recognise those labels in those images. Switching out the model will change how the algorithm behaves.
The default model used here is yolo26n.pt, but this isn't the only model you could use. The model is set by a parameter, which is a ROS 2 way to change the configuration of nodes when they start up. In this case, we can set the model_name parameter with a different model name, and the node will attempt to load that model instead. For example, yolo26n.pt and yolo26s.pt are both valid. Take a look at the metrics for the Ultralytics YOLO26 models to select the right model for yourself. For this example, make sure to use a "Detect" model, as the other models work differently.
To set the parameter, we can either edit the launch file:
# Change the default_value argument
model_name_arg = DeclareLaunchArgument(
"model_name", default_value="yolo26n.pt", description="YOLO model filename"
)
Or we can override the parameter when we launch the node:
ros2 launch yolo26_ros2 yolo_camera.launch.py model_name:=yolo26s.pt
In either case, launching the node will download the new model and run it instead, which gives us the ability to easily change out the model we're using as well as easily deploy it.
Now that we're able to run the node and change the model being used easily, let's take a look at how the code to see how this happens.
Code Deep Dive
From running the example, we've already seen that the package:
- Allows ROS 2 to automatically install package dependencies
- Copies any models in the
modelsdirectory to the build output - Contains a launch file for launching the
usb_camnode at the same time as theyolo26_ros2node - Contains a node that:
- Can be configured using parameters to change the model being loaded
- Loads the model using the
ultralyticsPython package - Subscribes to images from the webcam
- Performs CV inference on those images using the Ultralytics YOLO26 model
- Publishes the outputs as a Detection2DArray, an annotated image, and a compressed version of the annotated image
This section looks closely at the code to show how each of those functions are performed.
ROS 2 Package Setup
This package started with the default Python package template. The template includes package description file package.xml, a Python package build file called setup.py, and the source code of the node in yolo26_ros2/yolo26_ros2.py.
Package Description
This file contains information about the package, such as the author and the license of the package. It also has a section for package dependencies, which tells ROS 2 which dependencies need to be installed to run the package. These lines state the dependencies for the package:
<depend>rclpy</depend>
<depend>sensor_msgs</depend>
<depend>cv_bridge</depend>
<exec_depend>vision_msgs</exec_depend>
<exec_depend>python3-ultralytics-pip</exec_depend>
<exec_depend>usb_cam</exec_depend>
This means that when rosdep is used to install dependencies for this package, it will look up the right packages to install based on these keys and install them. It also tells the build system that this package needs access to the dependencies to function correctly.
Python Package Build File
The setup.py file also states the package author, as this is standard for a Python package, but it has some extra parameters describing what should be copied during the package build. These lines state that all files in the models and launch folders should be copied to the output:
data_files = [
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
('share/' + package_name + '/launch', glob.glob('launch/*.launch.py')),
('share/' + package_name + '/models', glob.glob('models/*')),
]
When colcon is used to build this package, these data files will be copied to the build output. You can use this to download a YOLO model to the models, then copy it to the build output automatically with colcon.
Launch File
The launch file system is more powerful than a list of nodes to launch at the same time. We are using it for a simple use case, which is to provide the two nodes to launch and the parameters that can be tweaked as we launch them.
The launch file is available at launch/yolo_camera.launch.py.
It starts with imports and a function to generate the launch description, which is used by ROS 2 to launch the nodes. The first lines in the launch description are to set parameters, such as the model name:
model_name_arg = DeclareLaunchArgument(
"model_name", default_value="yolo26n.pt", description="YOLO model filename"
)
The other parameters are similarly structured.
The launch description then defines the nodes to be launched. For example, the yolo26_ros2 node looks like this:
yolo_node = Node(
package="yolo26_ros2",
executable="yolo26_ros2",
name="yolo_detector",
parameters=[
{
"image_topic": LaunchConfiguration("image_topic"),
"detections_topic": LaunchConfiguration("detections_topic"),
"annotated_image_topic": LaunchConfiguration("annotated_image_topic"),
"model_name": LaunchConfiguration("model_name"),
}
],
output="screen",
)
This defines that the yolo26_ros2 executable from the yolo26_ros2 package should be run with the given parameters, and the node name should be yolo_detector. The output argument just says that the log statements should be printed to the screen when the launch file is run.
Finally, the parameters and nodes are collected together into one list, which forms the LaunchDescription.
return LaunchDescription(
[
model_name_arg,
image_topic_arg,
detections_topic_arg,
annotated_image_topic_arg,
usb_cam_node,
yolo_node,
]
)
yolo26_ros2 Node
This node (yolo26_ros2/yolo26_ros2.py) is where most of the work is being done. Let's go through the file section by section to see how it all fits together.
The first section contains imports for the package. This is standard Python, so we will skip past.
The next line creates a class for the detector node, which extends the ROS 2 Node class. It creates a Python constructor and calls the Node's constructor with the node name (source).
class YoloDetectorNode(Node):
def __init__(self):
super().__init__("yolo_detector")
The function continues by setting up parameters. These are ways to configure the node's behaviour, such as changing the YOLO mode to be used. Each parameter is declared to ROS 2, then the value of that parameter is retrieved from ROS 2.
# Declare parameters
self.declare_parameter("image_topic", "/image_raw")
self.declare_parameter("detections_topic", "/detections")
self.declare_parameter("annotated_image_topic", "/image_annotated")
self.declare_parameter("model_name", "yolo26n.pt")
# Get parameters
image_topic = self.get_parameter("image_topic").value
detections_topic = self.get_parameter("detections_topic").value
model_name = self.get_parameter("model_name").value
annotated_image_topic = self.get_parameter("annotated_image_topic").value
The node sets up a CvBridge and finds the right location to load the model from, then constructs the model (source). This is the point where the ultralytics library will automatically download the model if it's not already available on disk.
# Load YOLO model from package share directory
package_share_dir = get_package_share_directory("yolo26_ros2")
full_model_path = os.path.join(package_share_dir, "models", model_name)
self.get_logger().info(f"Loading YOLO model from: {full_model_path}")
self.model = YOLO(full_model_path)
self.get_logger().info("YOLO model loaded successfully")
The model is now loaded and ready for use!
The next lines set up the publishers and subscribers for ROS 2. One subscriber subscribes to Image messages from the camera, giving an image_callback function as an argument, which is called whenever an Image message is received. The other lines set up publishers which can publish messages later in the code.
# Create subscriber and publishers
self.img_sub = self.create_subscription(Image, image_topic, self.image_callback, 10)
self.det_pub = self.create_publisher(Detection2DArray, detections_topic, 10)
self.annotated_img_pub = self.create_publisher(Image, annotated_image_topic, 10)
self.compressed_img_pub = self.create_publisher(
CompressedImage, annotated_image_topic + "/compressed", 10
)
Every time an Image is received by the node, it calls the image_callback function with that message as an argument. The function immediately converts the message from the ROS 2 Image message to the OpenCV format, which can be passed to the loaded model.
def image_callback(self, msg):
try:
# Convert ROS Image to OpenCV format
cv_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding='bgr8')
The model can then perform inference on the image:
# Run YOLO detection
results = self.model(cv_image, verbose=False)
So far the only two lines from the ultralytics package have been to load the model and then use the model to perform inference on an image. These lines respectively are:
self.model = YOLO(full_model_path)
results = self.model(cv_image, verbose=False)
The rest of the code has all been code for interacting with ROS 2 so the node can run on the robot. The Ultralytics part has been very simple!
Now that the node has the results of the inference, it can package it up into the three different outputs. First, it goes over all the results and builds a Detection2DArray message:
# Create Detection2DArray message
detection_array = Detection2DArray()
detection_array.header = msg.header
# Process each detection
for result in results:
boxes = result.boxes
for box in boxes:
detection = Detection2D()
...
# Publish detections and annotated image
self.det_pub.publish(detection_array)
The lines I've skipped are building the individual Detection2D messages from the results of the inference.
The node also takes the original image and adds green rectangles, class labels, and score percentages for each one (source):
cv2.rectangle(cv_image, (x1, y1), (x2, y2), (0, 255, 0), 2)
label = int(box.cls[0])
label_readable = self.model.names[label]
score = float(box.conf[0])
cv2.putText(...)
annotated_img_msg = self.bridge.cv2_to_imgmsg(cv_image, encoding='bgr8')
annotated_img_msg.header = msg.header
self.annotated_img_pub.publish(annotated_img_msg)
One of the key parts of drawing the bounding boxes is labelling the box with what's inside it. However, the model's prediction contains a number rather than a name for the class. That means we need to look up the name from the model. We can look up the name using this code:
label_readable = self.model.names[label]
At this point, the node has published an array of objects it detected in the image, plus the original image annotated with bounding boxes for each detection. The last output is simple - it's the JPEG compressed version of the annotated image. This is purely done so that if you are viewing the images across the network like I do, the performance will be much better.
compressed_image_msg = CompressedImage()
compressed_image_msg.header = msg.header
compressed_image_msg.format = "jpeg"
compressed_image_msg.data = np.array(cv2.imencode(".jpg", cv_image)[1]).tobytes()
self.compressed_img_pub.publish(compressed_image_msg)
After this, there are some log statements to print information to the console and exception catching to make sure errors are handled correctly.
The final part of the node is very simple. It's the main function, which constructs an instance of the YoloDetectorNode class, then runs it until the process is shut down.
def main(args=None):
rclpy.init(args=args)
node = YoloDetectorNode()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
And that's the complete file! The three functions that we used from ultralytics were to load a model, perform inference on an image using the loaded model, and look up the name of a class from the model given the label number from a prediction.
# Load the model from disk, or download if not available
self.model = YOLO(full_model_path)
# Perform inference on an image
results = self.model(cv_image, verbose=False)
# Look up the name for a label number from a detection
label_readable = self.model.names[label]
It's clear that Ultralytics has worked hard to make their ultralytics Python package as simple to use as possible. That's great news for robotics engineers, because intelligent robotics almost certainly needs some kind of CV!
If you've run the demo successfully and you're looking for a challenge, see if you can run the model with hardware acceleration! This could be on your desktop with a GPU, or on any hardware acceleration on the robot's board, such as the NPU or the RDK X5's BPU chip. Measure the latency and framerate against the CPU-only model and let me know your results!
Summary
In this post, we saw a simple ROS 2 node for performing Computer Vision (CV) inference on images from other ROS 2 nodes. We combined this node with the usb_cam node, which can be used to stream images from a webcam. All of this runs directly on a robot using the CPU, although other hardware acceleration is available.
By looking into the structure of the node, we saw how the ultralytics Python package could be used to download, load, and use the Ultralytics YOLO26 model. With just three lines, we could detect objects in an image with a confidence value, and we could also change the model in use by changing a ROS 2 parameter.
The Ultralytics YOLO26 model proved extremely easy to deploy on a robot. The other reasons to use Ultralytics YOLO26, such as faster inference and better performance on large and small objects, are up to you to test! Try the node for yourself and see what kind of performance you can get from various models. Also see if you can enable hardware acceleration, such as enabling cuda on a machine with a graphics card.